Larry has been undergoing trials and there are some software and hardware changes coming.
Issues are:
* Larry "steps" though his assignments and doesn't have flow. This is because I'm programming him to take a step, evaluate, repeat. There's another way that will allow Larry to move more fluidly.
* It's clear that the infrared sensor responds differently to stainless steel surfaces and very dark surfaces than it does to light painted surfaces. As a result, Larry will smash into stainless steel or dark surfaces like they aren't even there. Looking side to side isn't much help.
* Turning Larry 1 unit makes him turn about 40 degrees. This is too much. There is no way to make a 90 degree turn, or anything close to it.
* Larry currently turns right, unless he's made 3 previous right turns, then he turns left. Larry can get trapped still.
The solutions to these problems are a combination of programming and mechanical engineering.
Making Larry's motion more fluid is a programming issue. And this is addressed in this version.
Dealing with the infrared sensor is also a programming issue. In this version, Larry adjusts his forward speed based on his perceived distance from an object. The closer the object, the slower he goes, until he reaches a certain point and needs to turn. Hopefully this will take care of this problem, otherwise, I'll need to implement a touch sensor.
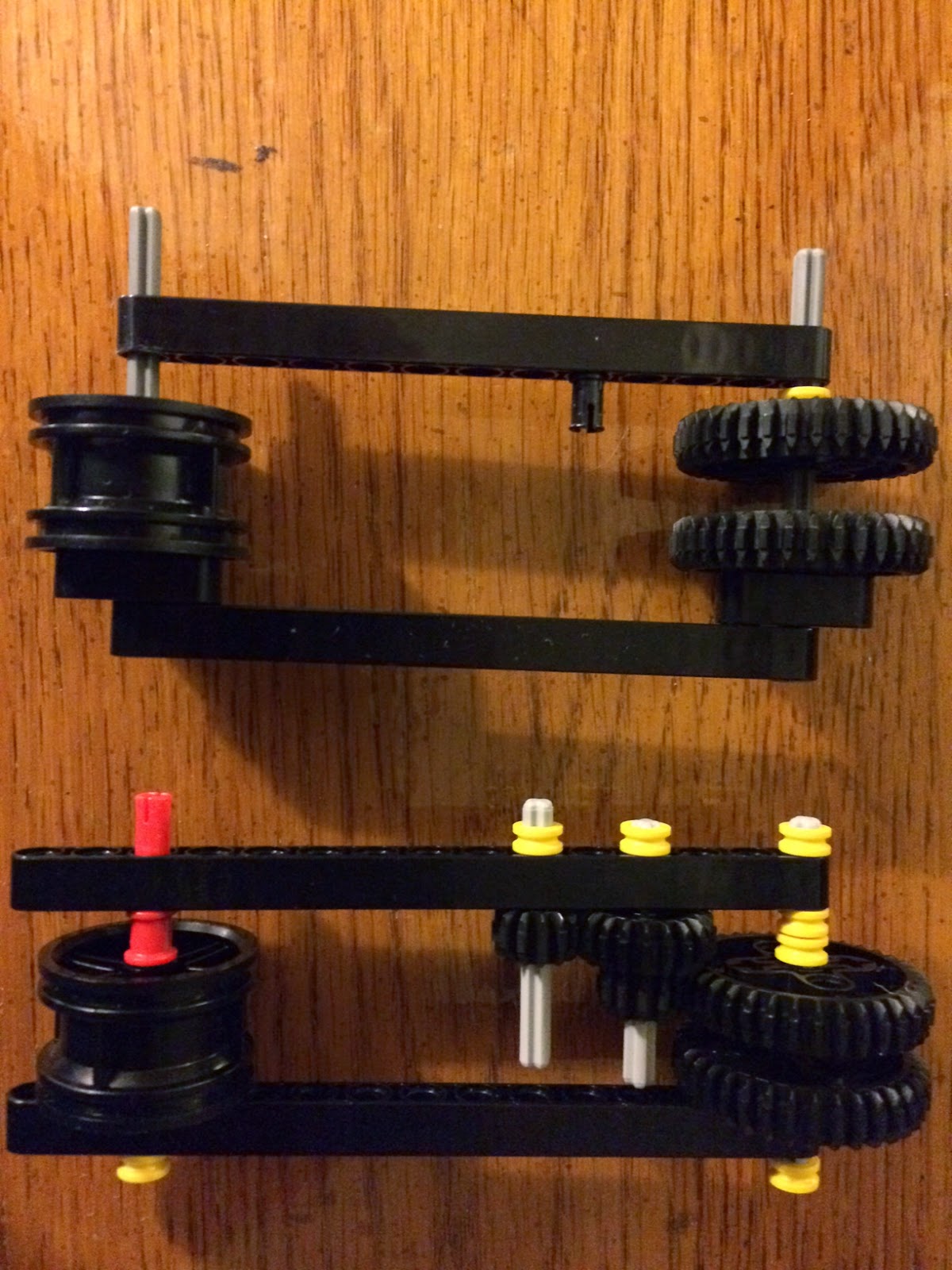
Getting more precise control over Larry's turns is a mechanical issue. Currently, the output from the motor goes directly to the track, or a 1:1 ratio. In version 4.0, a gear train is being implemented with 1CM, 2CM and 3.5CM gears. This will give a 7:1 gear ratio or 7x better control over his turning. At issue is the lack of 1CM gears. The initial kit only comes with 2, and I need 2 per track. I also need more yellow hubs. It looks like I'll be looking for Lego store tomorrow to see if I can swing by and grab some. Otherwise, I'll be ordering them online and waiting a few days.
Redesigning of the tracks with a gear train means I need to adjust how the track mates with the frame. If I simply re-mount it, the CG will be too far aft.
In this version, when Larry reaches an obstacle, he looks about 45 degrees to each side and turns to the side with the greatest room between him and the next obstacle.
The pic below is the track assembly without a gear train and the new one, with a gear train...